
1.场景需求分析
人形机器人运动控制模块的核心职责是驱动髋关节、肘关节等执行机构完成行走、抓取等高精度动态动作。每个关节内部需同时容纳电机驱动器、编码器反馈电路及控制信号线路,对连接器提出了多维度的严苛要求:其一,关节空间极其狭小(典型截面积≤30mm直径),标准工业连接器体积过大且重量超标;其二,关节在高频摆动(频率可达10-500Hz)与瞬间启停中承受强烈振动冲击,普通连接器仅靠摩擦力保持插合极易松脱;其三,电机功率线、编码器信号线、温度传感器反馈线等多路通道需在同一连接器内并行传输,串扰隔离与电气绝缘缺一不可。
2.产品应用方案
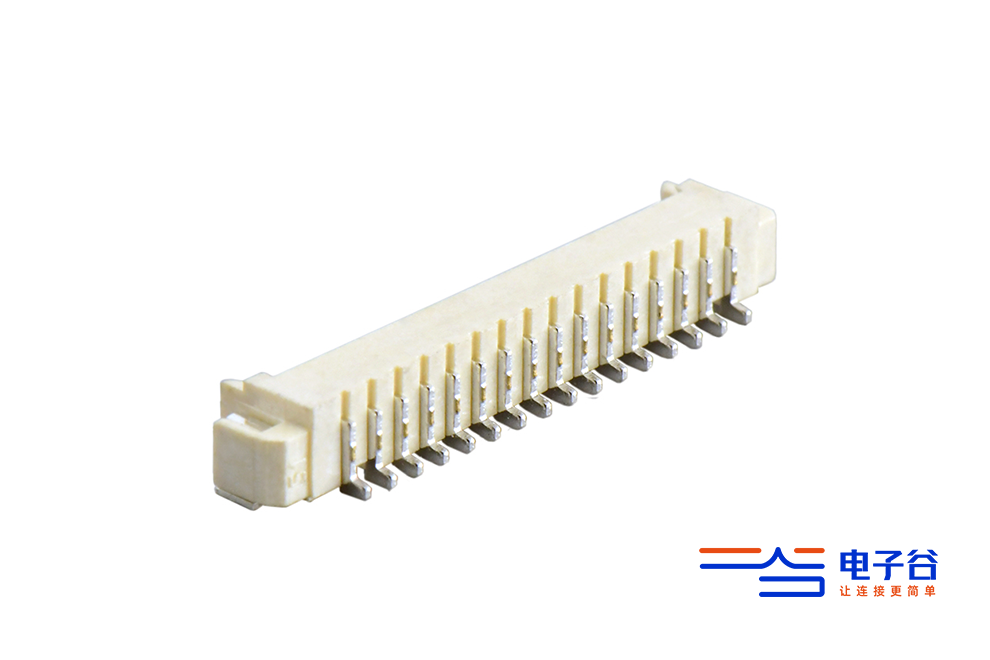
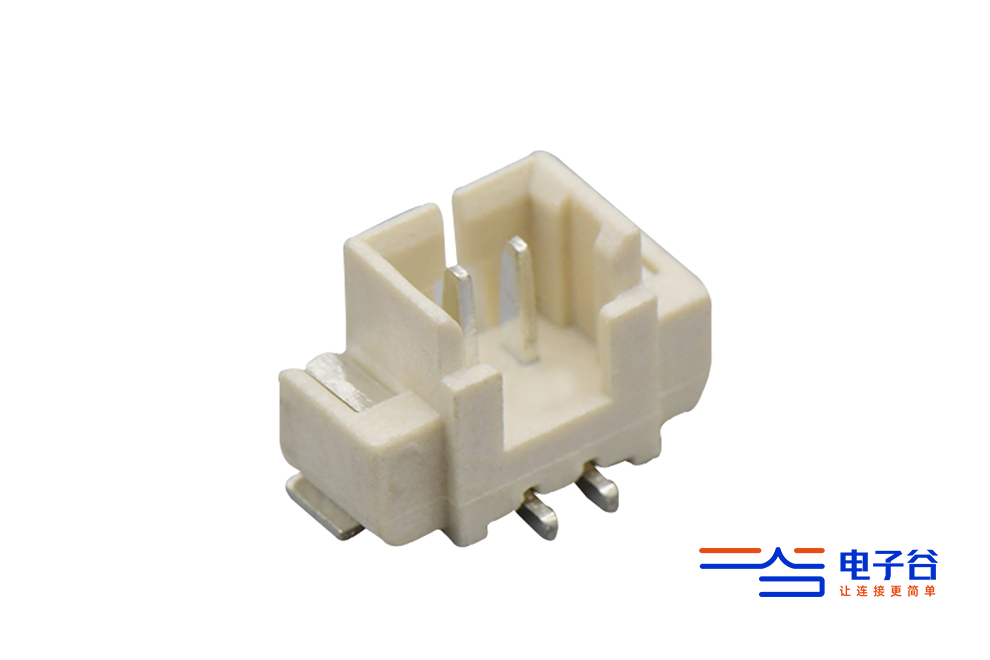
针对运动控制模块的严苛需求,电子谷推荐A1251系列作为关节驱动连接的核心方案。A1251系列是1.25mm间距的线对板连接器,Wafer针座通过SMT焊接于电机驱动器PCB上,线端胶壳配合压接端子将多路信号与电源导线汇集输出。在具体布局中,可根据关节内部通道数量灵活选择2-17pin规格,搭配RJ45水晶头实现运动控制总线的高速差分信号传输,同步满足电源供电与编码器反馈的信号分配。
3.技术特性
A1251系列采用两点接触式端子设计,在低电流、低电压和高振动条件下确保可靠的电气连接,端子表面提供镀锡与镀金两种方案,镀金型号可在严苛环境下显著提升可靠性与耐久性。胶壳采用摩擦锁扣结构,插合后产生正向锁紧力,有效抵抗高频振动下的松脱风险。紧凑的1.25mm间距相比传统2.54mm间距可节省约60%安装空间,使连接器在直径≤30mm的关节腔体内仍可实现8路以上通讯通道集成。
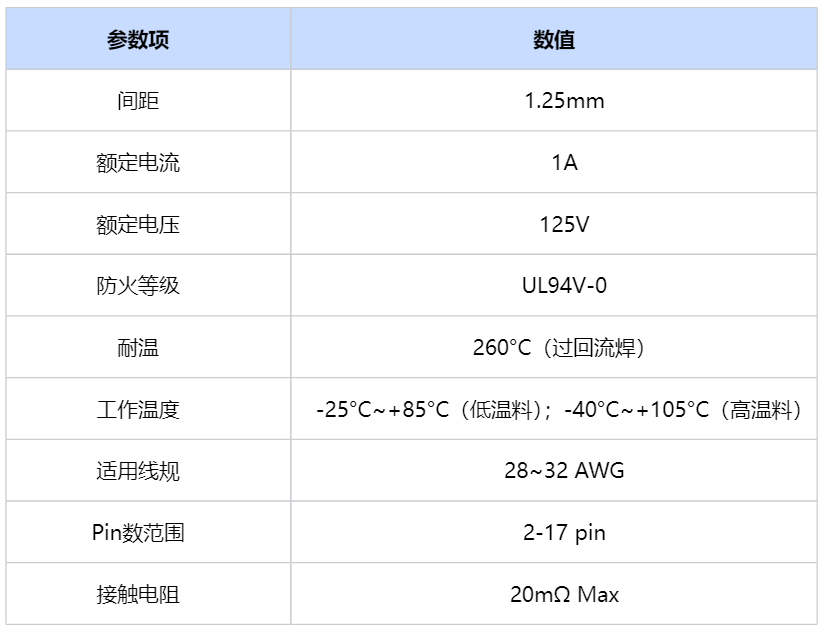
4.核心参数
5.应用效果
在工程实践中,电子谷A1251系列已成功配套于多款人形机器人运动控制模块。采用该方案后,关节内部连接器由传统2.54mm间距方案替换为1.25mm微间距设计,连接器体积缩小约三分之二,为关节电机散热与结构支撑腾出宝贵空间。定制的微间距外锁连接器搭配SecureLocking安全锁定装置,高频振动环境下100万次摆动无松脱,实现了空间效率、多路信号集成与抗振可靠性的统一-。
电子谷A1251系列1.25mm间距线对板连接器以紧凑尺寸、摩擦锁扣抗震设计及镀金提升可靠性的产品特性,精准匹配人形机器人运动控制模块对空间紧凑、多通道信号整合与持续振动防护的综合需求,是关节驱动连接的高可靠选择。


