在人形机器人的感知系统中,传感器种类繁多且分布密集——头部有麦克风阵列,手部有触觉传感矩阵,躯干及关节部位遍布温度、压力和位置传感器。这些传感器各自产生的信号量不大——通常为数字I/O、I2C、SPI或模拟电压——但通道数量众多,且对信号之间的串扰隔离有明确要求。
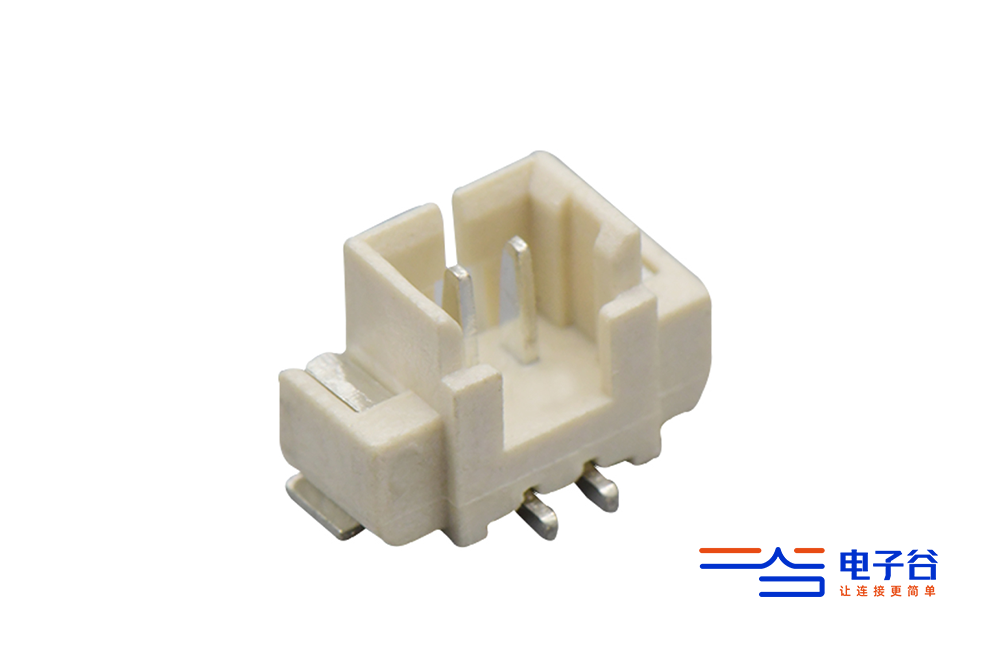
电子谷PH1.25胶壳端子正是为这类“多路低速信号汇聚”场景提供的高密度连接方案。1.25mm的端子间距使得在有限PCB空间内可排布从2到10余个通道的连接器,满足从单路传感器到多参数智能传感器的不同线数需求。在人形机器人的计算决策模块中,PH1.25胶壳端子常与RJ45水晶头、USB 3.0连接器等配套使用,将麦克风信号线、触觉反馈线、低速传感器数据线等“支线”信号统一接入主控板,与高速以太网主干链路形成互补。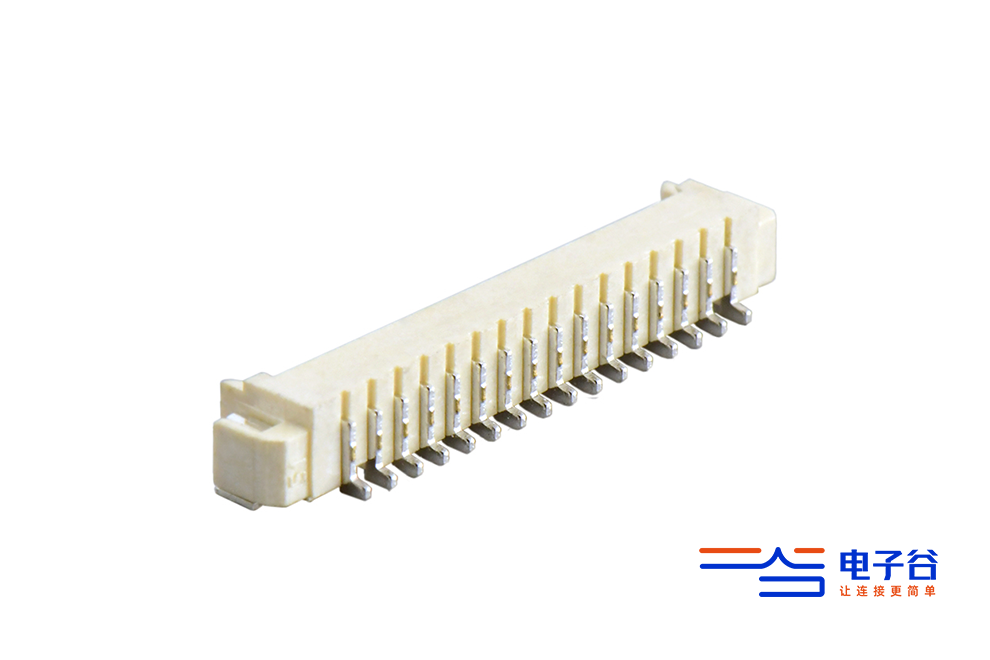
胶壳内部采用摩擦锁紧结构,插合后提供正向锁紧力。在机器人行走和运动带来的持续振动中,这个锁紧力保证多路信号连接不会因松动而出现间歇性接触不良。端子基材选用磷青铜,以铆压方式与导线连接,适配细线径导线(典型28~32 AWG)——这恰好是微型传感器最常用的信号线规范围。镀金型号在长期使用中保证接触界面不受氧化影响,维持稳定的低接触电阻。
在头部麦克风阵列的信号连接中,PH1.25胶壳端子利用多通道优势在一处物理接口集中传输全部麦克风的音频信号,显著精简布线空间;在手部触觉传感阵列中,多路压力传感器的模拟信号通过PH1.25端子分组接入模数转换板,组合方式灵活适应不同传感器布局。它承担的角色虽不如工业以太网主干链路那般引人注目,但却是人形机器人“神经网络末梢”不可或缺的连接环节,为大规模传感器数据汇聚提供了一套紧凑、灵活且可靠的基础物理接口。