具身智能是一种基于物理实体与环境动态交互产生的智能形态,核心特征体现为实体载体+感知决策+环境适配的闭环系统。与聚焦虚拟数据处理的离身智能不同,其本质是让智能通过物理身体感知环境、执行动作,并在交互中持续优化行为策略,实现从信息理解到物理实践的跨越。中科院物理所明确指出,具身智能的核心并非身体本身,而是通过身体实现与环境的深度耦合及任务落地的能力。
业界普遍共识将本体、智能、环境列为具身智能三要素,三者形成不可分割的有机整体。
本体是物理载体,承担感知与执行功能,需具备适配环境的运动结构与感知模块;
智能是决策核心,依托大模型与算法实现环境理解、任务规划及动态调整;
环境是交互场景,既为智能进化提供数据输入,也决定本体形态与功能设计方向。
本体作为具身智能的物理承载,是连接虚拟智能与物理世界的关键枢纽,其设计高度依赖应用场景,核心构成包括三大系统。
感知系统:通过摄像头、雷达、力传感器等获取环境数据,2025年主流产品已实现128线激光雷达与多模态视觉的融合感知;
运动系统:由电机、减速器、丝杠等组成,决定本体移动与操作能力,人形机器人通常搭载20-30个驱动关节;
控制系统:集成大小脑异构架构,小脑负责实时运动控制,大脑搭载具身大模型处理复杂决策。
具身智能机器人的界定与分类

(一)定义
具身智能机器人是具身智能的典型终端载体,指具备物理实体形态,通过感知-决策-执行闭环实现自主环境交互与任务完成的智能系统。其核心区别于传统机器人的特征在于依托大模型实现跨场景泛化能力,而非局限于预设程序,能够通过数据学习持续提升作业精度与环境适应性。
(二)类型
按功能定位与智能层级,具身智能机器人可划分为四大类,且呈现融合发展趋势: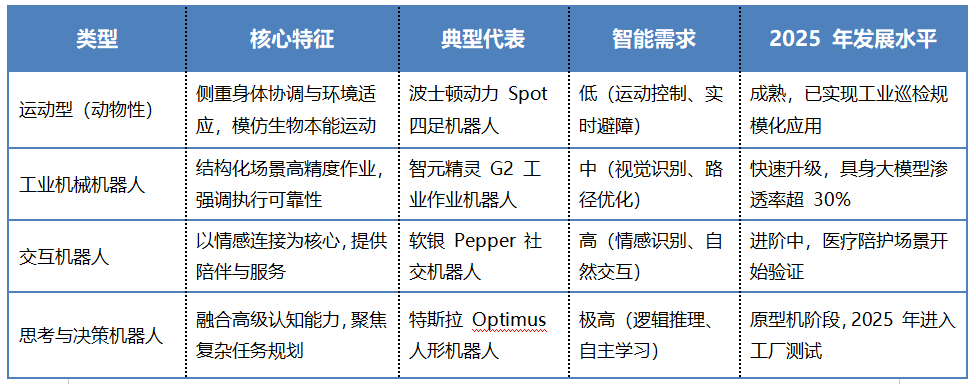
全球发展历程与产业环境
(一)发展历程
具身智能机器人的演进可分为三个阶段:
1.技术积累期(2010-2020年):以运动控制技术突破为主,波士顿动力Atlas实现双足稳定行走,但缺乏自主决策能力,依赖预设程序;
2.智能融合期(2021-2024年):大模型技术与机器人结合,谷歌RT-2模型实现视觉-语言-动作联动,中国智元、优必选推出具身智能原型机;
3.商业化起步期(2025年至今):产品从实验室走向真实场景,智元精灵G2获数亿元工业订单,人形机器人成本进入快速下降通道。
(二)产业环境
全球主要经济体已将具身智能机器人列为战略产业,形成政策与资本双轮驱动格局。
政策端:中国将具身智能写入2025年政府工作报告,深圳新增45亿元专项投资聚焦核心零部件;美国通过《国家人工智能研发战略计划》强化技术垄断,欧盟以《人工智能法案》规范产业发展;日本在登月型研发计划中明确2030年通用人形机器人原型机目标。
资本端:2025年上半年全球具身智能产业链融资达195亿元,平均单笔融资1.35亿元,本体企业融资占比63%,深圳、北京、上海集聚全国70%的产业链企业。
技术创新与产业化现状
(一)核心技术突破
1.大模型融合:英伟达发布IsaacGROOTN1通用机器人基础模型,实现跨设备模型迁移;谷歌RT-2模型使机器人指令执行准确率提升至74%,较传统算法提高40%。
2.算力架构重构:大小脑异构成为主流,单板单核控制器量产落地,小脑处理毫秒级运动控制,大脑依托云端算力进行复杂决策,延迟降低至50ms以内。
3.数据驱动升级:全球建成超20个专业数据采集工厂,仿真数据应用率从2024年的45%升至2025年的68%,低成本数据解决方案使模型训练成本下降50%。
(二)产业化进展
2025年成为具身智能机器人商业化元年:工业场景率先突破,智元、优必选等企业产品进入汽车制造、3C装配领域,完成车身检测、物料分选等任务;招标市场持续升温,上半年全球招标249件,预算金额4.06亿元,高校院所、通信运营商为主要采购方。但大规模落地仍受限于泛化能力不足,85%的本体企业将产能一致性与成本控制列为首要攻坚目标。
市场规模与技术路线

(一)市场规模体量
全球市场呈现爆发式增长态势,不同机构预测虽有差异,但均指向高增速特征:GGII数据显示,2024年全球市场规模41.86亿元,预计2026年突破180亿元,2025-2026年增速均超100%;《2025人形机器人与具身智能产业研究报告》则预测2025年全球规模达195.25亿元,中国占比27%(52.95亿元),2030年中国市场将占全球44.6%。
(二)主流技术路线
1.本体形态分化:从单一模仿人类形态转向场景适配设计,轮式(仓储)、足式(巡检)、轮足混合(工业作业)并行发展,智元G2轮足机器人获龙旗科技亿元订单验证实用性。
2.落地模式双轨:自主化路径聚焦结构化场景批量作业,遥操作模式适配高风险场景(如电力巡检),形成自主作业+远程兜底的安全冗余体系。
3.供应链协同:本体企业与零部件厂商深度合作开发,关节模组、灵巧手等核心部件模块化率提升至50%,车规级标准开始渗透至机器人领域。
分产品与核心零部件发展概况
(一)分产品市场
人形机器人:成本进入快速下降通道,2024年单机成本约50万元,预计2026年降至28.54万元,2030年下探至10万元;2025年上半年招标量居首,但主要用于科研与高端制造测试。
工业机器人:具身化改造加速,2025年具身智能渗透率超25%,在汽车焊接、电子装配场景的作业效率较传统机器人提升30%,中国市场占全球工业机器人具身化改造量的40%。
服务机器人:医疗护理、物流仓储、家庭服务三大场景渗透率合计达62%,中国仓储机器人出口2025年上半年同比增长217%,主要流向东南亚制造业基地。
(二)核心零部件格局
1.伺服系统:空心杯电机因高功率密度成为灵巧手核心部件,瑞士maxon仍占高端市场70%,中国江苏雷利量产产品功率密度达进口水平的85%;无框力矩电机在腰部驱动场景渗透率超60%,国产替代率45%。.jpg)
2.传动系统:RV减速器(重载关节)日本纳博特斯克市占率65%,中国绿的谐波在中低端市场替代率超30%;谐波减速器(轻载关节)国产率达50%,精度误差控制在1弧分以内;滚珠丝杠以日系(THK)为主,行星滚柱丝杠国产化处于样品阶段。
3.感知与连接:激光雷达(128线)用于环境建模,大疆Livox在服务机器人市占率超40%;毫米波雷达辅助近距离避障,国产率达80%;电子谷智能连接器与线束强调抗振动与信号稳定性,工业场景防护等级普遍达IP67。
下游需求与发展现状
(一)全球需求结构
ToB市场率先起量,预计2026年突破百亿元规模;ToC市场处于10亿元级,但家庭服务、康养等场景潜力巨大,3-5年有望突破百亿。从采购主体看,2025年上半年高校院所(科研)、通信运营商(测试)、国企(工业应用)分列招标量前三,占比超60%。
(二)中国发展现状及挑战
中国具身智能机器人行业已形成全球第二极的发展格局,2025年市场规模预计达52.95亿元、占全球27%,其中工业场景(汽车制造、3C电子)贡献55%核心增量,服务场景(清洁、物流)占比35%,政策端超80亿元专项投入与制造业322台/万人的机器人密度形成需求共振,且实验室到工厂试点周期仅14个月、较欧美缩短40%。创新层面,2024年专利申请量同比激增90.37%,驱动系统(电机、控制器)专利占比32%居首,但核心发明专利仅占45%,海外专利占比12%,跨机械与AI领域的复合专利不足10%。产业集群优势突出,粤港澳大湾区占全球供应链24%,深圳聚集200余家骨干企业,50公里半径内可完成80%零部件采购,硬件成本较全球平均水平低18%,迭代速度较长三角快30%。
行业发展仍面临三重核心瓶颈。技术上,大模型泛化能力不足导致真实场景任务完成率仅55%,根源是真实场景数据集不足65万条、算法微调时存在“灾难性遗忘”、国产多模态传感器识别率82%(低于日本基恩士的95%),复杂指令执行能力薄弱;供应链上,高端RV减速器(日本纳博特斯克市占65%)、高功率密度电机(瑞士maxon主导)进口依赖度超60%,进口部件成本是国产的2.3倍,交货周期长达6个月、制约量产节奏;生态上,缺乏统一技术与测试标准导致多品牌接口不兼容、评估指标混乱,认证成本增加15%,出口欧洲需经多轮认证、周期6个月且成本较日本企业高20%,跨区域数据标注难以复用进一步阻碍规模化落地。


